Sekasam - RC kosačka s GPS navigáciou
Máte doma kosačku s pojazdom? Chcete ju ovládať na diaľku? Alebo dokonca chcete, aby sa ovládala sama? Podporte Sekasam - RC kosačku s GPS navigáciou!
Autor: Peter Otto

0 €
vybrané z
1 700 €
0% splnené
0 ľudí prispelo
Všetko alebo nič. Projekt skončil 19.4.2015 v 15:59.
Vyberte si odmenu za váš príspevok
-
predané 0Meno v titulkoch: V záverečnom videu z prestavby uvediem Vaše meno.
Doručenia odmeny: nešpecifikované
5 € -
predané 0Návod na prestavbu: Meno v titulkoch + návod na prestavbu v pdf.
Doručenia odmeny: nešpecifikované
10 € -
predané 0Softvér: Meno v titulkoch + návod na prestavbu v pdf + softvér.
Doručenia odmeny: nešpecifikované
20 € -
zostáva 30 z 30VIP: Meno v titulkoch + návod na prestavbu v pdf + softvér + konzultácia v prípade záujmu.
Doručenia odmeny: nešpecifikované
50 € -
zostáva 3 z 3Kooperácia: Meno v titulkoch + návod na prestavbu v pdf + softvér + spolupráca na Vašom projekte.
Doručenia odmeny: nešpecifikované
500 €
Ako sa to začalo
K vytvoreniu projektu RC kosačky ma motivovali nadobudnuté skúsenosti z môjho školského projektu - prestavby RC modelu auta na model riadený počítačom. Naučil som sa v ňom ako nahradiť RC ovládač klávesnicou a myšou, streamovať video s minimálnou odozvou a využiť algoritmy počítačového videnia na autonómne riadenie. Teraz chcem vytvoriť niečo praktické, čo by sa dalo použiť nielen pre zábavu.
Čo je cieľom
Cieľom projektu je prestavať bežnú kosačku s pojazdom zadných kolies na kosačku ovládanú na diaľku počítačom. GPS navigácia umožní riadiť kosačku automaticky podľa naplánovanej trasy. Súčasťou kosačky bude HD kamera, odkiaľ sa bude streamovať video do PC klienta.
Hlavné ciele:
- manuálne riadenie kosačky prostredníctvom PC z pohľadu prvej osoby,
- automatické riadenie s asistenciou GPS modulu.
Použitie darov
Vaše peniaze budú investované do nasledovných položiek:
- dve predné kolesá
- maximálne dve vysokovýkonné servá
- jedno stredne výkonné servo
- elektronika + kamera + GPS modul
- vývoj softvéru
Nejde o financovanie prototypu ani ochrany duševného vlastníctva. Na softvér sa bude vzťahovať licencia GPL a na všetko ostatné licencia Creative Commons (typ BY).
Detaily
Názov Sekasam, teda "seká-sám" už sám napovedá, že by kosačka mala pracovať prinajmenšom bez fyzickej prítomnosti človeka - ovládaná na diaľku, v ideálnom prípade samočinne, podľa vopred naplánovanej trasy. Budeme upravovať existujúcu, bežnú záhradnú kosačku s pojazdom zadných kolies, bez spätného pohonu.
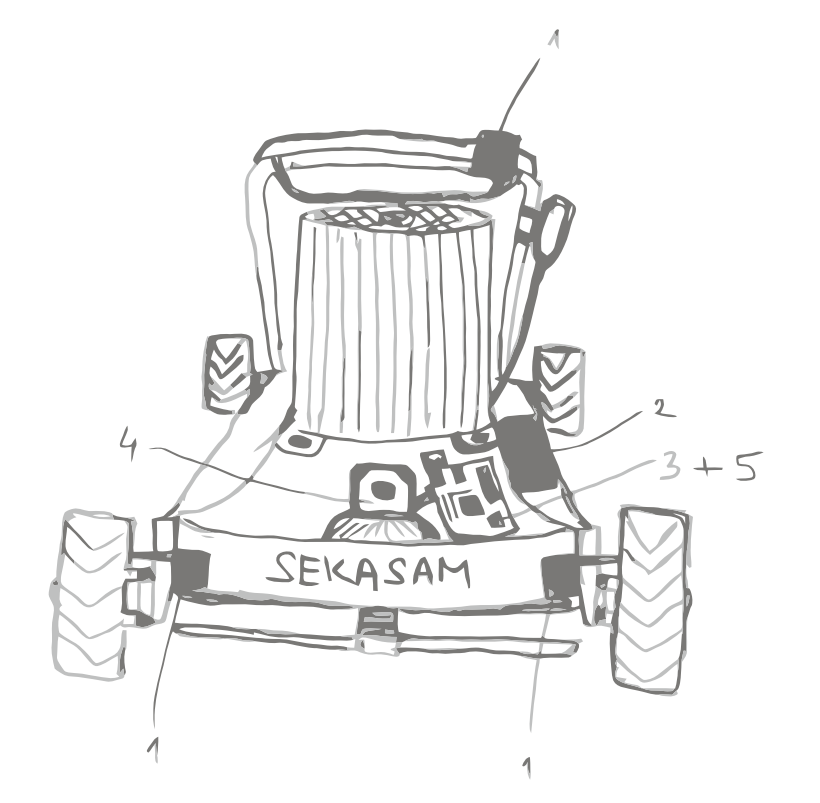
Projekt RC kosačky zahŕňa:
- nahradenie predných kolies otočnými,
- využitie servo pohonu na riadenie a spúšťanie pojazdu (1),
- integráciu riadiacej jednotky (3), HD kamery (4) a GPS modulu (5),
- komunikáciu cez bezdrôtovú sieť,
- mobilné napájanie (2),
- vytvorenie riadiaceho softvéru.
Softvér
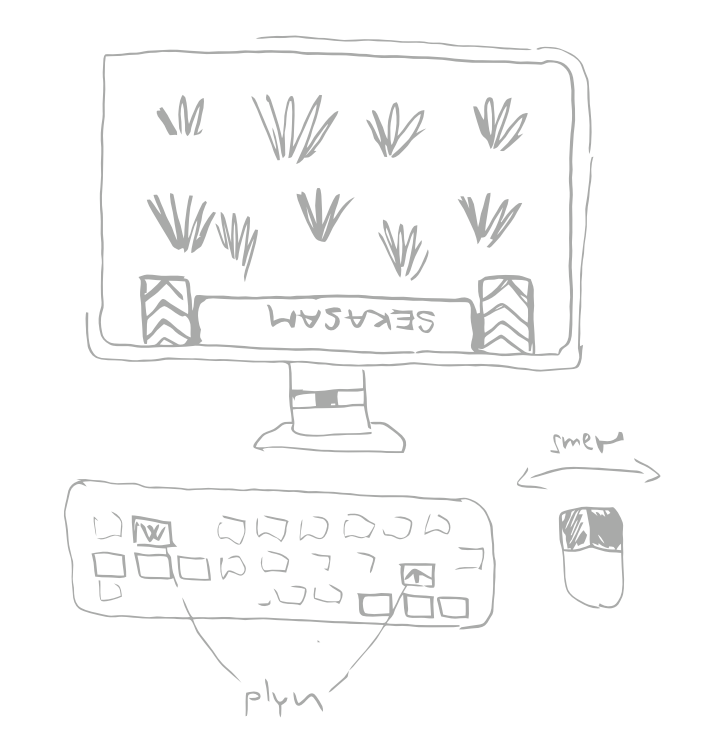
Softvér bude pravdepodobne rozdelený do dvoch aplikácií - webovej stránky a spustiteľného programu. Webová stránka bude určená pre režim manuálneho riadenia. Na monitore uvidíme obraz z kamery. Zatáčať sa bude pohybom myši a pridávať plyn klávesou W alebo šípkou vpred (ako v PC hrách). Video prenos a riadenie budú mat minimálnu odozvu. To znamená, že pohyb myši sa prejaví okamžite zmenou smeru jazdy. Obe aplikácie budú súčasťou inštalačného obrazu disku s nahratým operačným systémom.
V režime navigácie cez GPS by som chcel vymyslieť spôsob vymedzovania súradníc (obr. vľavo), na základe ktorých by sa vytvorila mapa trasy (obr. vpravo). Kosačka sa po prejdení jedného úseku presunie na druhý a takto bude pokračovať, až do konca.

Skúsenosti s prestavbou RC modelu auta
Nižšie si môžete pozrieť dosiahnuté výsledky z predošlého projektu (RC auta).
Demonštračné video - režim sledovania lopty: https://www.youtube.com/watch?v=KlCeNIPWv9A

Režim sledovania čiary: https://www.youtube.com/watch?v=S738DGEAwE0

Demonštračné video - režim rozpoznávania symbolov: https://www.youtube.com/watch?v=XUaZGbw4X2o

Kto som
Študent IT. Môj prvý robotický projekt bola prestavba RC auta na model riadený počítačom. V rámci projektu som na školskej študentskej konferencii získal 2. miesto za prezentáciu spôsobu streamovania videa z auta do PC. Teraz nadišiel čas na posun vpred.
Predpokladaná realizácia a využitie
Hrubý návrh môže začať prakticky ihneď po získaní potrebných financií. Kosačka môže byť využiteľná na kosenie väčších plôch, kde je priestor na manévrovanie - napr. ihrisko. Na testovanie budú vhodné letné mesiace. S povolením dobrovoľne kosiť trávu by snáď nemal byť problém :) Keďže ide o hobby projekt, výsledkom práce bude jedna "vylepšená" kosačka. Ak budete chcieť vlastný Sekasam, postup nájdete v dokumentácii.
Ďakujem všetkým, ktorí sa rozhodnú tento projekt podporiť.
Vyberte si odmenu za váš príspevok
-
predané 0Meno v titulkoch: V záverečnom videu z prestavby uvediem Vaše meno.
Doručenia odmeny: nešpecifikované
5 € -
predané 0Návod na prestavbu: Meno v titulkoch + návod na prestavbu v pdf.
Doručenia odmeny: nešpecifikované
10 € -
predané 0Softvér: Meno v titulkoch + návod na prestavbu v pdf + softvér.
Doručenia odmeny: nešpecifikované
20 € -
zostáva 30 z 30VIP: Meno v titulkoch + návod na prestavbu v pdf + softvér + konzultácia v prípade záujmu.
Doručenia odmeny: nešpecifikované
50 € -
zostáva 3 z 3Kooperácia: Meno v titulkoch + návod na prestavbu v pdf + softvér + spolupráca na Vašom projekte.
Doručenia odmeny: nešpecifikované
500 €
Komentáre